华南理工大学本科生课程报告
课程类别: 专业选修课
课程名称: 智能机器人技术
课程代码: 145030
任课教师:
《自主移动机器人避障实验》
姓 名 xxx
学 号 000000000000
院 系 计算机科学与工程
班 级 计算机科学与技术
成 绩
课程报告提交时间:
课程报告说明
(打印时本页可去掉)
1.实验项目名称:要用最简练的语言反映实验的内容。
2.实验目的与要求:目的要明确,要抓住重点,符合实验大纲的要求。
3.实验原理:简要说明本实验项目所涉及的理论知识。
4.实验环境:实验用的软硬件环境(配置)。
5.实验方案设计(思路、步骤和方法等):这是实验报告极其重要的内容。概括整个实验过程。
对于操作型实验,要写明依据何种原理、操作方法进行实验,要写明需要经过哪几个步骤来实现其操作。
对于设计型和综合型实验,在上述内容基础上还应该画出流程图、设计思路和设计方法,再配以相应的文字说明。
对于创新型实验,还应注明其创新点、特色。
6.实验过程(实验中涉及的记录、数据、分析):写明上述实验方案的具体实施,包括实验过程中的记录、数据和相应的分析。
7.结论(结果):即根据实验过程中所见到的现象和测得的数据,做出结论。
8. 小结:对本次实验的心得体会、思考和建议。
目 录
1.实验目的11
2.实验任务说明11
2.1.实验任务描述11
2.2.人员分工11
3.实验内容11
4.实验总结22
5.参考文献22
- 实验目的
熟悉机器人仿真软件(例如Simbad、Webots、TeamBots、Player/Stage/Gazebo、MotionPlaner等)的使用方法;掌握若干机器人路径规划算法。 - 实验任务说明
- 实验任务描述
实验要求:在机器人软件平台上建立一个包含若干个静止障碍物和运动障碍物的仿真环境,设定机器人的起始点和终点后,机器人能够规划出一条从起始点到目标点的安全路径。查阅相关路径规划算法,实现一种以上算法并相互比较。要求给出源代码、试验结果并且进行演示。
总体方案:本方案主要采用人工势场法来实现自主移动机器人的壁障寻径。利用目标对机器人的引力和障碍对机器人的斥力的合力来建立人工势场,机器人沿着势场降的方向运动,最终到达目标点。
人员分工
- 实验任务描述
| 姓名 | 工作内容 |
|---|---|
| xxx | 查阅资料,实验设计,代码编写(人工势场法) |
| xxx | 栅格法 |
| …… | |
- 实验内容
3.1基础理论:
此次实验采用人工势场法来实现局部路线规划。
人工势场法的基本思想是将机器人在周围环境中的运动,设计成一种抽象的人造引力场中的运动,目标点对移动机器人产生“引力”,障碍物对移动机器人产生“斥力”,最后通过求合力来控制移动机器人的运动。
3.2实验方案设计和实验方法过程
(1)实验总流程
(2)漫步机器人行为设计:
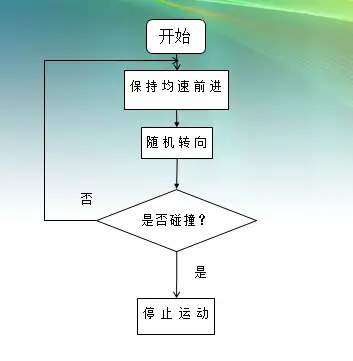
(3)避障机器人行为设计:
3.3试验环境(软硬件配置)
操作系统:Windows 7
实验环境:Eclipse SDK
实验平台:simbad
3.4实验结果与分析
实验截图:
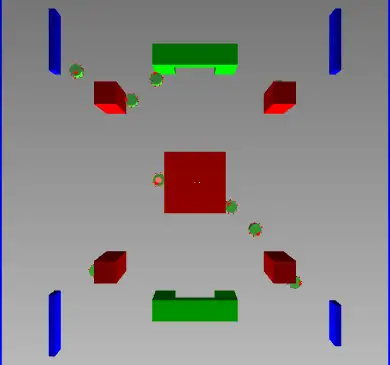
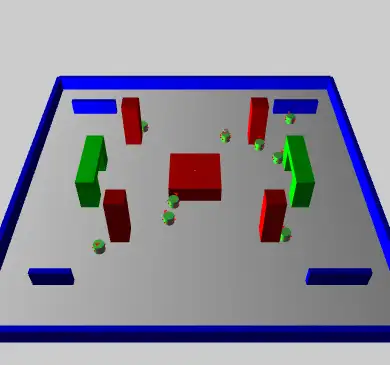
(2)实验结果:
机器人线性速度过大时,出现频繁碰撞现象,甚至卡在障碍物上.目标附近有障碍物时,机器人到达目标出现困难,会出现在目标附近打转等行为.由于部分路径较窄,当避障机器人与漫游机器人在甬道相遇时,往往会相互卡住.大多数情况下,机器人都能沿着一定路径到达目标点.
(3)分析:
实验结果体现了人工势场法存在局部最优点问题. 如果目标附近有障碍物,机器人在靠近目标的同时,也将向障碍物靠近,这时目标的引力将减小,而障碍物的斥力将增大,因此移动机器人在靠近目标的时候就会出现打转的现象.如果斥力系数过大,那这时候斥力将比引力大的多,这样目标点将不是整个势场的全局最小点,机器人将不可能到达目标。
- 实验总结
4.1实验结论
人工势场法在局部路径规划中有较好的效果,但这种方法也存在其局限性,即存在局部最优解问题.当目标点附近存在障碍物,将直接影响人工势场法的实际效果.
4.2个人小结
通过这次实验,对机器人运动设计有了更深的了解,对于人工势场法的原理及其在自主移动机器人运动控制中的运用有良好的掌握,同时也锻炼了我的动手实践能力.